
Welcome






at RWTH Aachen University!
The Virtual Reality and Immersive Visualization Group started in 1998 as a service team in the RWTH IT Center. Since 2015, we are a research group (Lehr- und Forschungsgebiet) at i12 within the Computer Science Department. Moreover, the Group is a member of the Visual Computing Institute and continues to be an integral part of the RWTH IT Center.
In a unique combination of research, teaching, services, and infrastructure, we provide Virtual Reality technologies and the underlying methodology as a powerful tool for scientific-technological applications.
In terms of basic research, we develop advanced methods and algorithms for multimodal 3D user interfaces and explorative analyses in virtual environments. Furthermore, we focus on application-driven, interdisciplinary research in collaboration with RWTH Aachen institutes, Forschungszentrum Jülich, research institutions worldwide, and partners from business and industry, covering fields like simulation science, production technology, neuroscience, and medicine.
To this end, we are members of / associated with the following institutes and facilities:
 | |
|---|---|
 | |
 | |
 | |
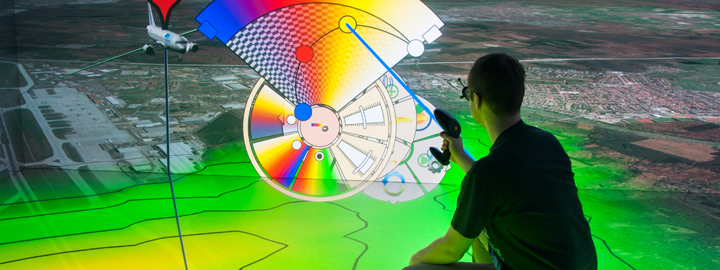
Our offices are located in the RWTH IT Center, where we operate one of the largest Virtual Reality labs worldwide. The aixCAVE, a 30 sqm visualization chamber, makes it possible to interactively explore virtual worlds, is open to use by any RWTH Aachen research group.
News
| • |
Sevinc Eroglu receives doctoral degree from RWTH Aachen University Today, our former colleague Sevinc Eroglu successfully passed her Ph.D. defense and received a doctoral degree from RWTH Aachen University for her thesis on "Building Immersive Worlds: Authoring Content and Interactivity in VR". Congratulations! |
Jan. 9, 2026 |
| • |
Jonathan Ehret receives doctoral degree from RWTH Aachen University Today, our former colleague Jonathan Ehret successfully passed his Ph.D. defense and received a doctoral degree from RWTH Aachen University for his thesis on "Enhancing Social Presence in Embodied Conversational Agents: A Multimodal Approach to Natural Communication". Congratulations! |
Dec. 8, 2025 |
| • |
Martin Bellgardt receives doctoral degree from RWTH Aachen University Today, our former colleague Martin Bellgardt successfully passed his Ph.D. defense and received a doctoral degree from RWTH Aachen University for his thesis on "Increasing Immersion in Machine Learning Pipelines for Mechanical Engineering". Congratulations! |
April 30, 2025 |
| • |
Active Participation at 2024 IEEE VIS Conference (VIS 2024) At this year's IEEE VIS Conference, several contributions of our visualization group were presented. Dr. Tim Gerrits chaired the 2024 SciVis Contest and presented two accepted papers: The short paper "DaVE - A Curated Database of Visualization Examples" by Jens Koenen, Marvin Petersen, Christoph Garth and Dr. Tim Gerrits as well as the contribution to the Workshop on Uncertainty Exploring Uncertainty Visualization for Degenerate Tensors in 3D Symmetric Second-Order Tensor Field Ensembles by Tadea Schmitz and Dr. Tim Gerrits, which was awarded the best paper award. Congratulations! |
Oct. 22, 2024 |
| • |
Honorable Mention One Best Paper Honorable Mention Award of the VRST 2024 was given to Sevinc Eroglu for her paper entitled “Choose Your Reference Frame Right: An Immersive Authoring Technique for Creating Reactive Behavior”. |
Oct. 11, 2024 |
| • |
Tim Gerrits as invited Keynote Speaker at the ParaView User Days in Lyon ParaView, developed by Kitware is one of the most-used open-source visualization and analysis tools, widely used in research and industry. For the second edition of the ParaView user days, Dr. Tim Gerrits was invited to share his insights of developing and providing visualization within the academic communities. |
Sept. 26, 2024 |
Recent Publications
 Objectifying Social Presence: Evaluating Multimodal Degraders in ECAs Using the Heard Text Recall Paradigm IEEE Transactions on Visualization and Computer Graphics
Embodied conversational agents (ECAs) are key social interaction partners in various virtual reality (VR) applications, with their perceived social presence significantly influencing the quality and effectiveness of user-ECA interactions. This paper investigates the potential of the Heard Text Recall (HTR) paradigm as an indirect objective proxy for evaluating social presence, which is traditionally assessed through subjective questionnaires. To this end, we use the HTR task, which was primarily designed to assess memory performance in listening tasks, in a dual-task paradigm to assess cognitive spare capacity and correlate the latter with subjectively-rated social presence. As a prerequisite for this investigation, we introduce various co-verbal gesture modification techniques and assess their impact on the perceived naturalness of the presenting ECA, a crucial aspect fostering social presence. The main study then explores the applicability of HTR as a proxy for social presence by examining its effectiveness under different multimodal degraders of ECA behavior, including degraded co-verbal gestures, omitted lip synchronization, and the use of synthetic voices. The findings suggest that while HTR shows potential as an objective measure of social presence, its effectiveness is primarily evident in response to substantial changes in ECA behavior. Additionally, the study also highlights the negative effects of synthetic voices and inadequate lip synchronization on perceived social presence, emphasizing the need for careful consideration of these elements in ECA design. 
|
 How Far is Too Far? The Trade-Off between Selection Distance and Accuracy during Teleportation in Immersive Virtual Reality IEEE Transactions on Visualization and Computer Graphics Target-selection-based teleportation is one of the most widely used and researched travel techniques in immersive virtual environments, requiring the user to specify a target location with a selection ray before being transported there. This work explores the influence of the maximum reach of the parabolic selection ray, modeled by different emission velocities of the projectile motion equation, and compares the resulting teleportation performance to a straight ray as the baseline. In a user study with 60 participants, we asked participants to teleport as far as possible while still remaining within accuracy constraints to understand how the theoretical implications of the projectile motion equation apply to a realistic VR use case. We found that a projectile emission velocity of 14 m/s (resulting in a maximal reach of 21.52 m) offered the best trade-off between selection distance and accuracy, with an inferior performance of the straight ray. Our results demonstrate the necessity to carefully set and report the projectile emission velocity in future work, as it was shown to directly influence user-selected distance, selection errors, and controller height during selection.
|
 SATOR: Seamless 3D Teleportation to both Ground and Mid-Air Targets IEEE Transactions on Visualization and Computer Graphics Traditional target-selection-based teleportation depends on the intersection of a (curved) ray with the scene's geometry, which limits navigation to points on the ground, restricting users' navigational freedom. While previous techniques exist that permit mid-air target selection, they are not optimal for transitioning between air and ground navigation, leading to inaccurate or lengthy interaction sequences. In this paper, we introduce SATOR, a new 3D teleportation technique designed to enable efficient and accurate navigation to both ground and mid-air targets by combining and enhancing previous approaches. Informed by the literature, we implemented four different parametrizations of our technique and compared them to a previously published technique that also enables both ground and mid-air target selection. Our user study with 30 participants indicates that SATOR is more efficient, accurate, and easier to use than the baseline. As a result, SATOR effectively helps users get an overview of the environment, observe features at different heights, or maneuver quickly around larger obstacles.
|
